服务热线
18962149679
服务热线
18962149679

手机 :18962149679
电话:18551271358
邮箱 :kuenrobot@163.com
地址:苏州市相城区相城大道888号凯翔大厦北楼4008-4010
技术收藏!abb机器人基础知识大全
应客户要求,我与我公司技术部门共同整理了以下ABB机器人编程基础知识,供您参考。以abb变频器故障代码为准,帮助您更好更方便的使用ABB机器人和更好的客户服务。
ABB机器人工作模式分为手动模式和自动模式两种。
1.手动模式:
主要用于调试人员进行系统参数设置、备份与恢复、程序编辑调试等操作,在手动减速模式下,运动速度限制在250 mm/s下,要激活电机上电,按下使动按钮。
2.自动模式:
主要用于工业自动化生产作业,此时机器人使用现场总线或者系统V/O与外部设备进行信息交互,可以由外部设备控制运行。
空间直角坐标系为以一个固定点为原点0,过原点作三条互相垂直且具有相同单位长度的数轴所建立起的坐标系三条数轴分别称为X轴、Y轴和Z轴,统称为坐标轴。
按照各轴之间的顺序不同,空间直角坐标系分为左手坐标系和右手坐标系,机器人系统中使用的坐标系为右手坐标系,即右手食指指向X轴的正方向,中指指向Y轴的正方向,拇指指向乙轴的正向。
1、 程序存储器的组成如下:
应用程序
系统模块
在机器人程序存储器中,只允许有一个主程序;所有的例行程序和数据,无论在哪个模块中,都由系统共享;所有例行程序和数据,除定义外,有名称。
1应用程序的组成部分如下:
·主模块ABB机器人编程示教主例程程序数据例程
·程序模块程序数据例程
2系统模块组成如下:
·系统数据
·例行程序
所有ABB机器人都有两个系统模块,用户模块和基本模块。根据机器人应用的不同,一些机器人会配备相应的系统模块。不建议修改任何自动生成的系统模块。
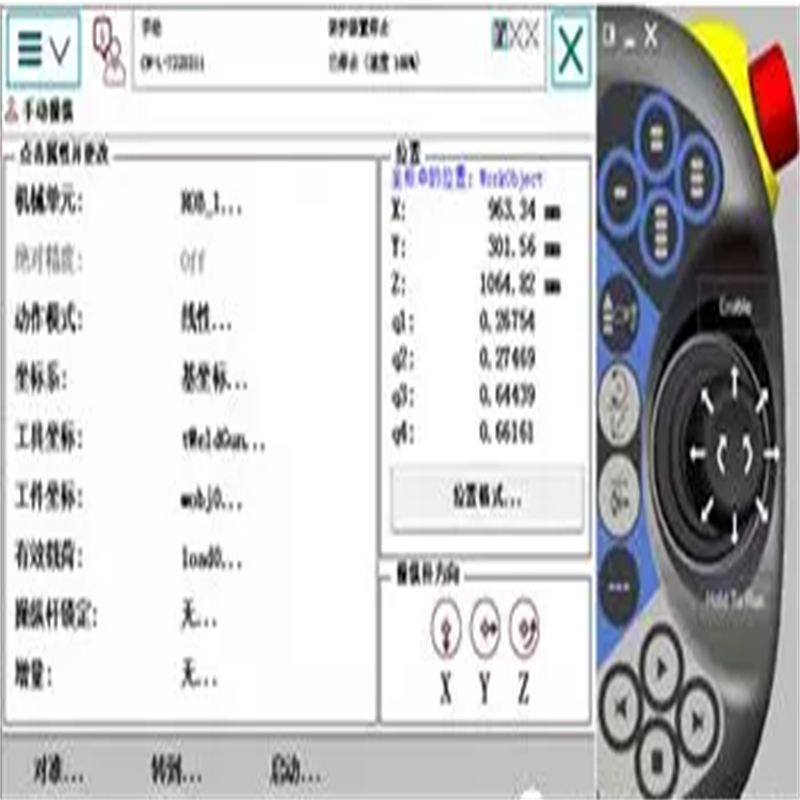
2、 编程窗口:
1菜单键文件:
1打开:打开现有文件。(程序。pRG或模块。国防部)
2新建:创建新程序。
3Saveprogram:存储已更改的现有程序。
4保存程序:存储新程序。
5打印:打印程序不再使用。
6项:定义自定义指令集。
7检查程序:要检查程序,光标将提示错误。
8关闭:关闭程序内存中的程序。
9Savemodule:存储已更改的现有模块。(仅在模块窗口中)
10Savemoduleas:存储一个新模块。(仅在模块窗口中)
2菜单键编辑:
ABB机器人编程示教
1剪切:剪切、指令或数据可能丢失。
2复制:复制。
3粘贴:将剪切或复制的指令或数据粘贴到相应位置。
4转到顶部:将光标移到顶部。
5转到底部:将光标移至底部。
6标记:定义一个块,遮住零件。
7Changeselected:要修改命令中的数据,可以将光标移动到相应的位置,然后按enter键。
8Showvalue:输入数据,将光标直接移动到相应的数据,然后按enter键。
9修改机器人的位置。在功能键上。
10搜索:寻找指令。当程序复杂时,它很有用。
11功能键:复制,粘贴和modpos可以在菜单中找到编辑键。
3、 说明:
1基本移动指令:
移动:线性运动
Movej:关节轴运动
Movec:圆周运动
p1:目标位置。(目标)
V100:运行速度mm/s(速度数据)
Z10:转弯区域尺寸mm。(区域数据)
刀具1:刀具中心点TCp。(工具数据)
(1) 速度选择:mm/S
·将光标移到速度数据,然后按enter键进入选择窗口以选择所需的速度。
·机器人的运行速度属于数据类型speeddata。
·通用运行速度已在基本模块中定义。
·速度可自行定义。
·速度为v5000,基本模块将高速定义为v7000,高速机器人可能无法实现。
(2) 转弯区尺寸选择:mm
·将光标移到转弯区尺寸数据上,按enter键进入选择窗口,选择所需的转弯区尺寸。
·机器人转弯区域大小属于数据类型zonedata。
·通用转弯区域尺寸已在基本模块中定义。
·转弯区域的大小可自行确定。
·精细是指机器人TCp到达目标点,当目标点的速度降到零时,机器人的动作连续停止。
·Zone是指当机器人TCp没有到达目标点时,机器人能够平稳平稳地移动。
·在基本模块中,转弯区域小的尺寸为Z1,大的尺寸为z200。
·尽量使用较大的转弯区域尺寸。
(3) 参数:
当光标处于当前命令中时,按功能键optiarg选择参数。
·Conc(switch)abb变频器故障代码协同运动。机器人尚未移动到目标点,已开始执行下一个命令。
·当采用新指令时,目标点将自动生成。·V(Num)定义速度mm/s。
·T(Num)定义时间s。速度由时间决定。
·Z(Num)定义转弯区尺寸mm。
·Wobj(wobjdata)使用工件坐标系。
(4) 函数offs():
移动LP1,v100,…
移动LP2V100,…
移动LP3,v100,…
移动LP4,v100,…
移动LP1,v100,…
·为了确定p1、p2、p3、p4点,可以使用函数offs()。
·Off(p1,x,y,z)表示x轴偏离p1、y轴偏离p1和z轴偏离p1的点。
·将光标移动到目标点,按enter键进入目标点选择窗口,在功能键上选择func,通过切换选择函数off()。
移动LP1,v100,…
移动流量(p1100,0,0),v100,…
移动(p1100,-50,0),v100,…
移动自由度(p1,0,-50,0),v100,…
移动LP1,v100,…
2I/O组指令:
·Do是机器人的输出信号。
·Di是机器人的输入信号。
·输入和输出信号在系统参数中定义。
·输入和输出信号有两种状态,1(高)为开,0(低)为关。
(1) 输出信号命令:
A.输出信号指令:set dol do1:输出信号名称。(signaldo)将输出信号分配给1。
B.Resetabb变频器故障代码输出信号命令:Reset do1 do1:输出信号名称。(signaldo)将输出信号分配给0。
C.输出脉冲信号命令:pulsedopplength:=0.2,do1,do1:输出信号名称。(signaldo)输出脉冲长度为0.2S的脉冲信号。
参数:
·正长(Num)脉冲长度,0.1s-32s。
(2) 输入信号命令:
怀特迪di1,ABB机器人编程示教1
Di1:输入信号名称。(信号DI)
3参数:
·等待输入信号的时间(Num)×长时间s。
·时间标志(bool)逻辑量,真或假。
如果只选择maxtime,机器人等待很长时间后将停止运行,并显示相应的错误信息。如果同时选择了参数变量maxtime和timelag,机器人将在等待超过长时间后自动执行下一个命令。如果在长等待时间内获得相应的信号,则逻辑值设置为假;如果超过长等待时间,则逻辑值设置为真。
4通信命令(人机对话)
(1) 屏幕命令:tperase
(2) 写入屏幕命令:pwrite string string:显示的字符串。(字符串)在示教器的显示屏上显示字符串数据,或用“…”形式直接定义字符串,每个屏幕写入指令显示80个字符以上。
(3) 功能键读取命令:tpreadfk,answer,text,fk1,fk2。Fk3,FK4,FK5。答:分配数值变量。(Num)文本:屏幕上显示的字符串。(字符串)fk1:功能键1显示的字符串。(字符串)fk2:功能键2显示的字符串。(字符串)fk3:功能键3显示的字符串。(字符串)FK4:功能键4显示的字符串。(字符串)FK5:功能键5显示的字符串。(字符串)
在示教器的显示屏上显示字符串数据,在功能键上显示相应的字符串数据。选择并按下相应的功能键,机器人将自动为数字变量分配相应的值1-5。
5程序停止命令:
(1) 停止命令:机器人停止,软ABB机器人编程示教停止命令在下一个命令中直接启动机器人。
(2) 停止命令退出:机器人停止运行,重置整个运行程序,并将程序运行指针移动到主程序行。机器人程序从头开始运行。
(3) 停止命令中断:机器人立即停止运行。如果有撞击,在下一个命令中直接启动机器人。
6定时指令:abb变频器故障代码
(1) 时钟重置命令:clkreset Clock:机器人时钟的名称。(时钟)
(2) 时钟开始指令:clkstart Clock:机器人时钟名称。(时钟)
(3) 时钟停止命令:clkstop Clock:机器人时钟的名称。(时钟)
7速度控制命令:velset,override,Max
覆盖:机器人的运行速度为%。(数字)
值:机器人高速mm/s(num)
每个机器人运动指令都有一个运行速度。执行速度控制命令后,机器人的实际运行速度是运动命令的指定运行速度乘以机器人的运行速度(覆盖),并且不超过机器人的运行速度。
8等待指示:
等一下,等一下
时间:机器人等待时间s.(num)
等待命令只会让机器人程序暂停片刻。
9作业指导:
数据:=值
数据:指定的数据。(全部)
值:给定给数据的值。
举个例子:
ABB:=假;(bool)
ABB:=reg1+reg3;(num)
ABB:=“欢迎”;(字符串)
原点:=p1;(机器人目标)
工具1。tframe.trans文件。x:=工具1。tframe.trans文件。x+20;(工具数据)
10负载定义说明:
GripLoad负载
负载:机器人当前的负载,数据类型为loaddata。
以上是我与公司技术部门沟通后,对ABB机器人编程的一些基本知识。希望能给大家一些帮助和启示,并能更好的利用ABB机器人来共同提升自动化生产的程度。
手机号码 :18962149679
联系电话 :18551271358
联系邮箱 :kuenrobot@163.com
公司地址 :苏州市相城区相城大道888号凯翔大厦北楼4008-4010
手机站